ヒューマンマシンインタフェース
林誠治教授
ロボットを自在にあやつる楽しさを醍醐味に
ロボットには、人の形をした二足歩行ロボットをはじめ、無人で目的地まで運んでくれるロボットカーなど様々なものがあります。
例えば、われわれの研究室では、GPSを用いて現在の位置測位を行いながら目的の場所へ移動する自走式ラジコンカーの製作に関する研究を行っています。
これは『電子システム工学科ならでは』のハードウェアとソフトウェア技術の集大成の一例にすぎません。
例えば、われわれの研究室では、GPSを用いて現在の位置測位を行いながら目的の場所へ移動する自走式ラジコンカーの製作に関する研究を行っています。
これは『電子システム工学科ならでは』のハードウェアとソフトウェア技術の集大成の一例にすぎません。

みなさんも、ぜひ私たちと一緒に夢あるエンジニアを目指してみませんか?
Q
何処が良いのか
A
ロボットは将来われわれの社会において身近で欠かすことのできない存在になるのは間違いありません。 そこで大切なのは、ロボットが便利にかつ安全に人間と協調することができる、いわば如何に人間の肩代わりとなるかです。
従来のロボットというと産業用ロボットというイメージが浮かびますが、昨今では人形ロボットのような人間とのコミュニケーションを行うもの、自動運転車や無人飛行機ドローンなど未来の輸送を掲げるものまで実用化されようとしています。
これらを支える技術のコアとなる部分は電子システム工学科で学んだ知識がなければ、到底実現することはできません。
例えば人形ロボットでは、各種センサーによって現在の位置や状態を把握し、画像認識処理によって人間の目の役割を担い、音声認識によって人間との対話を理解する、その結果、モータやサーボ等のアクチュエータを最適に動かしています。 これらには電子システム工学科で学ぶ知識が当然含まれています。
これらを支える技術のコアとなる部分は電子システム工学科で学んだ知識がなければ、到底実現することはできません。
例えば人形ロボットでは、各種センサーによって現在の位置や状態を把握し、画像認識処理によって人間の目の役割を担い、音声認識によって人間との対話を理解する、その結果、モータやサーボ等のアクチュエータを最適に動かしています。 これらには電子システム工学科で学ぶ知識が当然含まれています。
ロボットの心臓部はすべて電子制御とプログラムによって実現されています!
Q
造ったモノ
A
ロボットカー・倒立制御ロボット
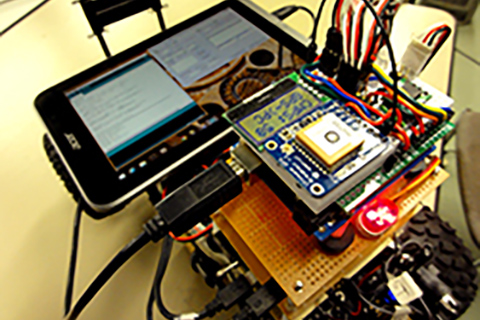
ロボットカー
GPSと磁気センサーを用いて位置測位や方角確認を行いながら目的の場所へ移動するRCカーの自動制御に関する研究を行っています。
自動運転とマニュアル運転を自在に切り替えることが可能です。
自動運転とマニュアル運転を自在に切り替えることが可能です。
倒立制御ロボット
倒立制御とはジャイロセンサーによる倒立振子機能を持つロボットの制御です。本研究では教育版レゴ・マインドストームを用いたロボットの倒立制御とライントレースに関する研究を行っています。

Q
現在の研究と今後の展望
A
ロボットを活用した場面で、より便利に、より高機能を目指して、日々研究・開発を行っています。
二足歩行ロボットに関しては、キネクトなどを用いて人間の動き(骨格情報)を取得し、ロボットが人間の行動を認識しながら自ら行動する、人工知能を有するロボットの開発を目指しています。
また、無人飛行機ドローンを活用した具体的な応用を探るとともに、当面は安全な飛行と目標物の監視を目的に考えています。