ロボット制御工学
香川 美仁 教授
ロボット開発はみんなが主役
ロボット・制御工学 教授の香川 美仁です。
私たちの住む環境内で、直接、私たちの役に立つ新しいロボットやその制御方法を研究しています。
私たちの住む環境内で、直接、私たちの役に立つ新しいロボットやその制御方法を研究しています。
Q
なぜ、研究を?
A
一人の力だけではできない研究
「こんなロボットがあれば便利だ」というアイデアを形にするには、どうしたらよいのでしょうか。その答えは、大学で学ぶ機械工学、ロボット工学とそのシステムの知識、さらに機械加工の基礎技術を付けたときに見えてきます。そして、サークル・研究室の仲間や先生との経験がそれを可能にしてくれます。
しかし、現実を見ると、実際に活用されているロボットは非常に限られています。これは、CGの中で動き回り、飛び回るようなロボットを見てつくられる私たちのロボット観が実に多様であることが、一因となっています。こうして見ると、「大学の授業で得た知識や技術をベースにして、みんなが主役となってアイデアを出し合い、創意工夫していく必要がある」と言えます。
 柵の間を動く気配のロボット
柵の間を動く気配のロボット 柵の間を動く気配のロボット
柵の間を動く気配のロボットQ
どこがよいか
A
真のロボットエンジニアになれ
二足歩行ロボットの研究を例として見てみましょう。このロボットの歩き方は1通りではありませんが、どの方法も、“決められた”ように関節を曲げるために、1秒間に100回位のスピードでコンピュータが計算を繰り返し、ロボットの関節を駆動するモータを制御しています。2本の足だけでも関節が12個ありますから、12個のコンピュータが忙しく働いています。こういうのをガチガチにコントロールするというのですが、実は、ガチガチにコントロールするからこそ“どこかギコチナイ歩き方“になってしまいます。もっと自然な歩き方で、しかも電池を使わない歩き方ができれば、私たちのそばにいても安心して見ていられるロボットになると思います。しかし、このようなアイデアを形にしようとすると、世界に1つしかないロボットを作ることになるので、メインのコンピュータプログラムとは別に、メカニズムや制御回路に組み込まれたマイコンプログラムなどの変更が生じます。このような壁を乗り越えてアイデアを形にできる者こそ、真のロボットエンジニアではないでしょうか。
私の研究室では、このような研究を通じて、「真のロボットエンジニアへの学習と経験」を積むことができます。
私の研究室では、このような研究を通じて、「真のロボットエンジニアへの学習と経験」を積むことができます。
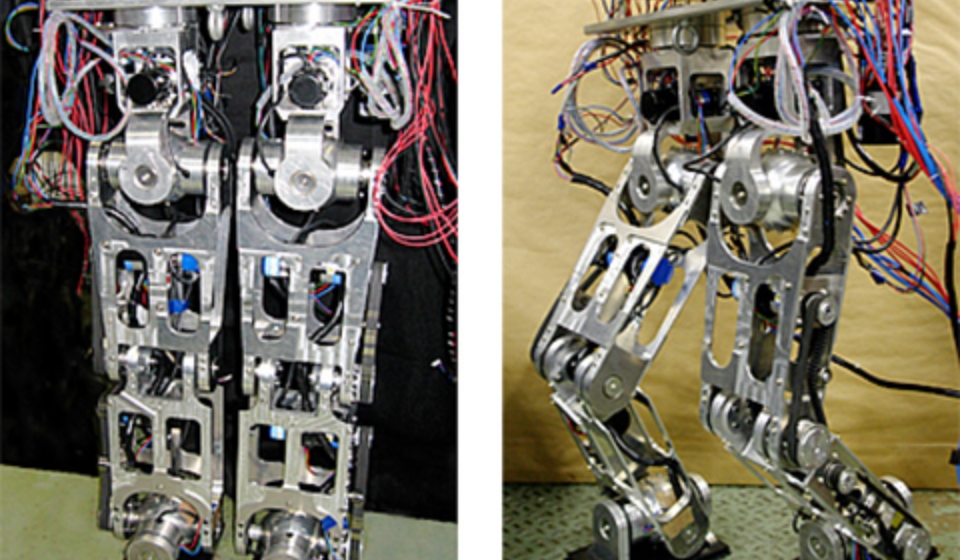
 研究室で開発した二足ロボットの第1号機
研究室で開発した二足ロボットの第1号機Q
造ったモノ
A
研究室で開発した二足ロボット
 研究室で開発した二足ロボットの第2号機
研究室で開発した二足ロボットの第2号機Q
現在の研究
A
より人間らしく
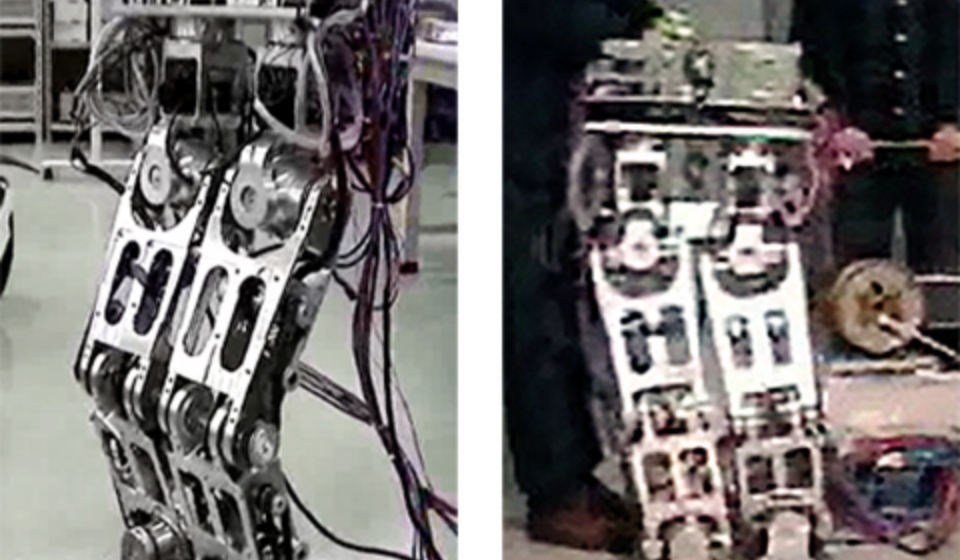 屈伸運動と歩行中の様子
屈伸運動と歩行中の様子
是非一緒に、世界で活躍するロボットを開発しましょう。
そしてその活動を通して、ロボットのメカニズム、制御回路、それを動かすソフトウェアまでを習得し、「アイデアを形にできるエンジニア」になってください。
そしてその活動を通して、ロボットのメカニズム、制御回路、それを動かすソフトウェアまでを習得し、「アイデアを形にできるエンジニア」になってください。